FULL Up dual deploy test: Flight computer deploys Apogee AND Main deploy.
More information on Demo-3 will be posted in the upcoming days.
The DEMO series of missions are designed to test and verify the operation of the avionics systems to be used on Cornelius’ Level 2 certification project. This series of tests will involve several level 1 rockets in his fleet to test various aspects of this avionics system between 2020 and the first L2 certification attempt launches, tentatively set for sometime in 2022.
The DEMO-2 launch originally had the objective of a repeat flight of DEMO-1, only this time to verify the operation of the new barometric pressure sensor during real-flight conditions.
During the time between the DEMO-1 launch and the scheduled launch of DEMO-2, the Block 5 RFC Core flight computer was completed, and undergoing pre-flight tests.
As launch time neared, I declared the RFC-100 block 5 core flight computer as ready for flight.
I gave serious consideration to updating the objectives of DEMO-2 to another “All Up” style test.
I re-ran the tests a few more times, and the RFC-100 Block 5 core flight computer passed again.
Cornelius and Jim at Mission Control reviewing rocket status data before the launch
The day before launch, I installed the block 5 computer, and configured Mr. Bean for the new mission objectives.
The (New) DEMO-2: combined the objectives of the original DEMO-4, 5, and 6 missions.
Those missions were:
(original) DEMO-4: RFC Block 4 test: First test of new RFC-100 core computer hardware, test dual channel pyro control by firing events AFTER motor delay and observe status telemetry event status reports.
(original) DEMO-5: RFC Block 4 test: First flight that allows RFC-100 flight computer to actually control flight events.
(original) DEMO-6: RFC Block 5 test: First flight of RFC with integrated dual channel MOSFET for flight events, and in-flight apogee test.
With the new flight computer installed, Mr. Bean was ready for mission DEMO-2.
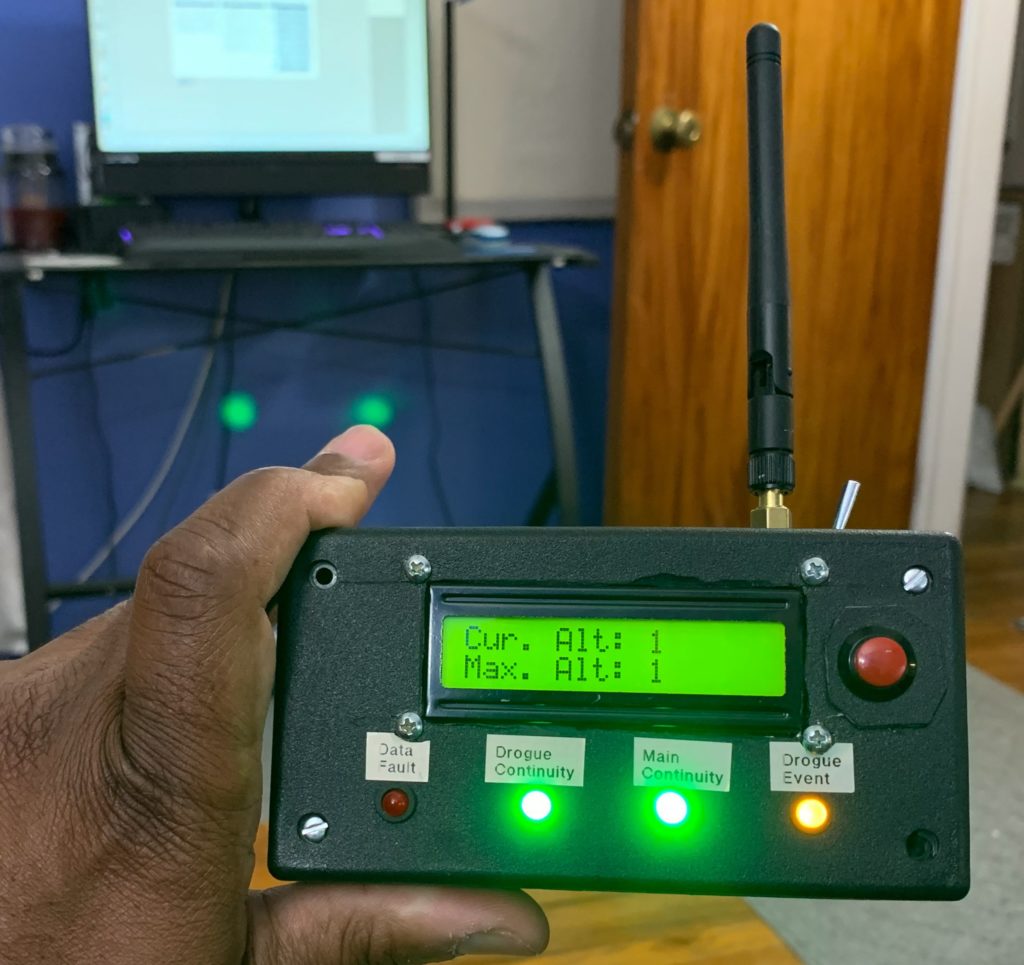
The mini basestation was also used with the DEMO-2 test flight. The unit performed to expectations.
Launch day:
Launched on an H-180 motor for this flight, Mr. Bean reached a maximum altitude of 1485 feet. The RFC-100 flight computer successfully performed the apogee event at 1480 feet.
Jim Seibyl was manning mission control for this flight. Jim goes by the stage name “Gheem” on The Rocketry Show podcast Thanks, Gheem!
Demo-2 liftoff
Also added to the DEMO-2 mission was a hand-held mini receiver. This device is useful during pre-launch arming procedures, getting current altitude information during launch, and for gathering exact GPS location updates from the rocket as recovery teams are near.
On the drive home, it sunk in that my flight computer works!
Mission Demo-2 is underway!
-The DEMO series of missions are designed to test and verify the operation of the avionics systems to be used on Cornelius’ Level 2 certification project. This series of tests will involve several level 1 rockets in his fleet to test various aspects of this avionics system between 2020 and the first L2 certification attempt launches, tentatively set for sometime in 2022.
The culmination of 6 years of background research has come down to the first rocket launch of the DEMO series of test launches.
Mr. Bean launching on mission DEMO-1
“There was SO much going on beyond just the launch & the data on the screen. After so many life delays, 6 years after the start of this project, a MAJOR milestone met & knocked over! Yesss!!!!” This was my reaction to the launch of DEMO-1 on my social media feeds.
What is “DEMO”?
DEMO is series of test launches that make up the first formal steps towards getting my Level 2 certification. I like to throw in something a little “extra” to keep my certifications “interesting”. Why do this the boring way? LOL.
Seriously, after watching many L2 launches, the one thing that gets me is the fact that many of these L2 rockets simply disappear from view when reaching altitudes of over a mile. This makes me nervous. Sending my rockets to altitudes where you can barely see them (if at all), and not knowing what is going on…hoping all works well. That is spooky.
So, I thought, why not develop a telemetry system that is capable of reporting back all relevant information on the status of the rocket, where it is, and more? This project started in 2014 with tests to gain experience with sending data over radio links from a rocket in flight. In those tests, the data consisted simply of Nesaru’s current altitude as reported by the on-board Perfect Flite Stratologger via its data port.
The resulting data stream was collected by the simple telemetry base station, which kept track of events. The telemetry receiver was actually an early prototype (code-wise) of the RFC-100 core flight computer!
The Nesaru tests resulted in a fairly solid telemetry link system to build upon. After a few year delay due to life, I began the next step…building the actual flight computer and its ground support systems. I gave the next phase of the program the code name of “DEMO”, for “Demonstration of feasibility”.
The road to first launch of this DEMO program started on September 2019.
This is when the final design and construction of the ground station telemetry receiver gear, and writing of software began.
By February 2020, The Rocket Flight Computer (RFC-100) version Block 1 was ready for it’s test flight. This launch would test the hardware and the initial version of software. This was to be DEMO-1, slated to launch March or April 2020.
The ground support telemetry receiver for the RFC-100 flight computer.
Mission DEMO-1 was to be followed by a series of test launches through much of the Summer / Fall 2020 from various rocket meets in Ohio & Upstate New York.
Here is a list of the original (planned) DEMO test launches, and their objectives:
DEMO-1: RFC Block 1 flight computer test. Real time telemetry and base station with simple altitude data and minimal flight event reporting.
DEMO-2: RFC Block 1 test, this time with on-board GPS telemetry tests. Add code for rich telemetry reporting data.
DEMO-3: RFC Block 2 test. Verify new RFC-100 core computer version via first in-flight test, Test “Mission Control” mission screen. This is done by connecting a computer to the Telemetry base station receiver to display detailed flight status information.
DEMO-3: RFC Block2 test. Add code for flight events, This test will consist of observing the actions of event software code to ensure the computer makes the correct decisions at the correct times during flight.
DEMO-4: RFC Block 4 test: First test of new RFC-100 core computer hardware, test dual channel pyro control by firing events AFTER motor delay and observe status telemetry event status reports.
DEMO-5: RFC Block 4 test: First flight that allows RFC-100 flight computer to actually control flight events.
DEMO-6: RFC Block 5 test: First flight of RFC with integrated dual channel MOSFET for flight events, and in-flight apogee test.
All 6 of the DEMO mission flights would be flown on the rocket “Mr Bean” – a rocket I inherited from my friend, Andrew Kleinhenz. I chose this rocket due to it’s four inch diameter airframe, and roomy payload section. Plenty of space to fly test electronics!
COVID changes everything
Once the news of Covid-19 spread, and governments shut down all group activities (including rocket meets) for an indefinite period of time to prevent the rapid spread of the disease.
In an attempt to not stall the project, I devised methods to test the operation of the RFC-100 core computer in my rocket lab.
This testing made progressing through RFC versions block 1 through 4 without actual flight tests possible.
RFC Core flight computers, block versions 1 through 4 (left to right)
This progression testing resulted in a total rewrite of much the code in the flight computer. By the time we were able to gather together to launch again, the objectives list for DEMO-1 changed to a list of MAJOR benchmarks – all at once, bypassing small step testing. As a result, I gave it the status of “All-Up test”.
Rocket lab tests suggested that everything SHOULD work fine during this flight. The danger for me, is if something should go wrong, then tracking down the exact cause of any hardware / software problem could prove difficult.
Given the unpredictable nature of the COVID situation at the time, which means we could be shut down again for another long period of time, I pressed forward with the “All Up” test flight.
The NEW Objective list for DEMO-1:
Flight Test of RFC flight computer Block 4 hardware. (skipping intermediate hardware version tests).
Test code for flight events – observing the actions of event software code to ensure the computer makes the correct decisions at the correct times during flight. (skipping tests of less complicated code versions first)
test on-board GPS data into telemetry feed. (adding more complexity to first-time ever in-flight code tests)
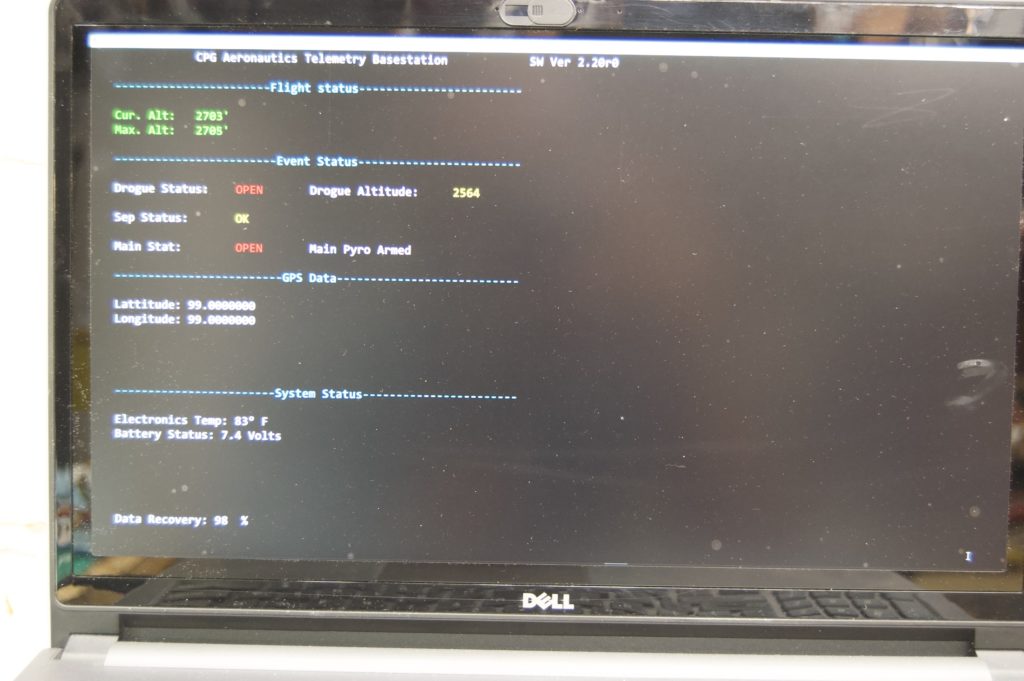
Test of the “Mission Control” computer system to display rich telemetry data in real time. (same challenge as above, but necessary should something go wrong in the RFC-100 code.
It’s going to be a Nail Biter!
The lack of the small step in flight progression tests of the hardware, and software architectures, where no part of the system or code has seen in-flight testing raised the stakes considerably. It would either be a really, really epic win, or a back to the drawing board situation for me after the flight.
To aid in post-flight analysis, friend Andrew Kleinhenz volunteered to man “Mission Control” and communicate to me via radio key data points from the telemetry data. For this flight, I will be near the LCO Officer to observe the rocket in flight. In addition, I decided to recorded the “data screen” using a video camera (aimed at the screen) to record all events.
Control status screen to show detailed telemetry information in real time
Launch day
After prepping Mr. Bean for launch, and verifying that the flight computer and ground support systems were ready for flight, I did a logistics review with Andrew, and launch was on!
Mr. Bean lifted off to a beautiful straight as an arrow flight to a reported altitude of 1259 feet, and all systems performed flawlessly. I poured over all the initial data, and everything just worked. I was in disbelief. For such a complicated test, I was expecting SOMETHING to be off.
DEMO-1 for all its complications appeared to be an unqualified success. Time to get home, and really dig into the data post-flight.
Detailed review reveals an anomaly.
Running through the event data over and over, it became apparent that something was amiss with the reported altitude of DEMO-1. I devised a new test procedure in the rocket lab for follow up on a hunch I was having, and confirmed that there was a skew in the translation of data from the barometric sensor. This “skew” was slightly different in the other two RFC core computers – with one reporting the correct altitude in a simulated launch within a few feet.
I hand-modified a test RFC Core computer to use a different barometric sensor, and re-ran the tests. With the different sensor, the reported altitude was essentially spot-on.
RFC-100 block 5 core flight computer was re-designed to use the new pressure sensor.
Later, I determined that the issue was caused by over-heating the sensor during construction. By this rime, the new code for the sensor was completed, and RFC-100 Block 5 core computer was very far along. Because of this, I stuck with the new sensor.
Next step: DEMO-2, which has planned, an in-flight test of a modified RFC-100 Block 4 core computer. The RFC-100 is modified to use the new sensor. Also, a possibility of adding the objectives of the original DEMO-4 mission to the list as well.
The newest member of the Perseus rocket family, Ares finally took to the sky with two impressive flights, and an adventure / scare on it’s first mission!
Ares launching on her maiden flight: Mission PLS-5016
After a couple of hours of pre-flight tests, I cleared Ares for mission PLS-5016, it’s first flight ever. It was an extra nervous occasion for me. This is because of some significant design changes I was trying out for the first time. These changes makes Ares quite different from her sister rocket, Nesaru, despite the very similar outward appearances. These structural changes resulted in quite a savings in weight, And on this day, these changes were about to put to the test for the first time.
Of these changes is the departure from the standard “Threaded rods and a sled” approach of mounting avionics (aviation electronics). The approach used in Ares is a nod to a technique I adapted from Endeavour (my experimental tube fin design). In this case, Ares has its electronics built behind access panel doors. There are two doors, each opposite the other. One provides access to the altimeter section, and the other to the on-board battery and (eventually) a telemetry transmitter system. This is a significant change from Endeavour’s system, which only has a single access panel, leaving the rest of the airframe for structural stability.
Ares has an “I Beam” type frame structure built around the access hatches to transfer all the stresses of flight & recovery AROUND the access panels. This framing (and mounting structures for the electronics) are all built from thick (but light) Basswood stock.
Just before liftoff, a storm started to blow in, but Ares flew beautifully. One hitch, however, is that the winds at the 1,000+ foot level were becoming quite strong. Ares flew gracefully to an altitude of 1604 feet on an CTI H135 motor. This is an altitude a little over 300 feet higher than Nesaru can reach on the same motor! The weight savings payed off. Structurally, everything held together beautifully, and functioned according to plan. There was no drogue parachute used, and Ares used tumble recovery for the first deployment event. Even thought the parachutes were deployed
The winds aloft were strong enough to carry Ares almost a mile downrange despite not having a parachute. The main parachute deployed at 600 feet, and Ares was well over a mile downrange in tall grass.
Recovery was not possible until the next day, after Ares sat out in straight line winds, and almost continuous downpour of rain for most of the night.
The rocket was recovered the next morning, in surprisingly good shape.
Ares disassembled to to dry after being lost in the field during all night storms…
She was dis-assembled back at base camp, cleaned up, and inspected.
The night was spent in a cold hotel room as I set the room AC low to drop the humidity enough to dry out the water logged parts of the rocket faster.
By the morning, the rocket was dry again. Monday morning was spent inspecting Ares for signs of further damage.
There was some minor damage that could not be repaired in the field, but by thinking like MacGuyver for a little bit, I “MacGuyver-ed” a solution, and gave a go at a second flight.
Ares lifted off that morning to beautifully clear sky. The flight was arrow straight, reaching an altitude of 1672 feet. Ares gently descended on it’s parachute not far from the launch pad on its return. This flight was a crowd pleasing launch as most were aware that she sat out in a field in storms just a couple days earlier, and it was amazing to see her fly seemingly with no damage!
Nesaru returned to the sky with what was planned to be the final of her long range telemetry system test flights. On-location interference in the 2.4 GHz band prevented that test from going forward, but not the launches!
Nesaru on the pad for flight PLS-5014 in Geneseo, NY
She flew two missions using a new thin mil 58″ parachute. This is the properly sized parachute for the Perseus V design, but parachutes thin enough to pack into Nesaru’s air-frame were not available until recently.
I found it fun to see Nesaru descend gracefully to the ground on the new parachute.
Nesaru flew two missions on September 30th 201.
The first, PLS-5014, lifted off in the late morning hours, and reached an altitude of 1310 feet, with a top speed of 198 MPH. Her launch trajectory (straight up) caused her to catch some strong winds above about 800 feet, which pushed her recovery area about a little more than a quarter mile into a dense soy-bean field. This made recovery quite difficult…not only due to the difficulty crossing soybeans that were no longer standing straight up, but also because it was impossible to see the rocket or it’s large parachute until you were on top of it all!
Liftoff! Mission PLS-5014 begins!Nesaru’s 58″ parachute is barely visible in the thick soybean field!
PLS-5015 was launched with a trajectory that placed the apogee event well away from the soybean field, which prevented a repeat journey into the soybean field. This also meant losing quite a bit of altitude. Maximum altitude was 1197 feet, reaching a speed of 202.5 MPH.
Both missions were launched on the CTI H-135-14 motor. Electronic deployment at apogee event, motor charge as a backup.
Mission 5015 liftoff! Don’t worry…the observers are not REALLY that close. Trick of the lens. They are no closer than I am when taking this picture!Nesaru drifting home majestically under parachute.
This marks the final test mission for Nesaru, and the start of a new task. I am now onto a new mission for the rocket. How many states in the US can I launch her from? 🙂
All technology tests will now transfer to the sister rocket, XR6-02 / Ares. She will resume high altitude telemetry tests, as well as testing other electronic flight instrumentation and construction techniques for a future Level II rocketry certification.